

L&TD
LOGGING & TESTING DIVISION
Phương pháp địa chấn dọc thành giếng khoan - VSP(phần 2)
Khảo sát VSP là Phương pháp đo địa chấn dọc theo thành giếng khoan. Thông thường là người ta tạo ra các chấn động địa chấn trên bề mặt và tiến hành đo các sóng chấn động đó dọc theo thành giếng. Với cách đo như vậy sẽ cho phép chúng ta khảo sát một cách chi tiết hơn, với độ chính xác cao hơn so với địa chấn thông thường trên bề mặt* (Surface seismic).
*Surface seismic: các đầu thu nằm theo tuyến ngang trong khi VSP là theo tuyến đứng hoặc theo xu hướng đứng.
I. NGUYÊN LÝ CƠ BẢN
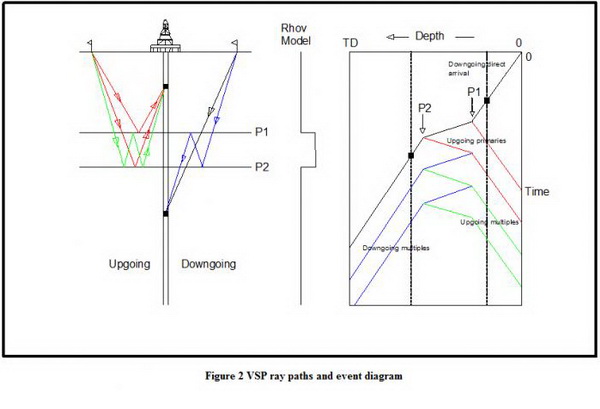
Để xem xét nguyên lý cơ bản của phép đo VSP, xây dựng mô hình truyền sóng.

Các yêu cầu để xây dựng mô hình truyền sóng:
1. Xét môi trường đơn giản nhất với giếng thẳng đứng và các mặt phản xạ nằm ngang, nguồn nổ được đặt sát giếng khoan, chỉ xét thành phần P.
2. Các tịa sóng trong một môi trường đồng nhất là đi thẳng, sóng từ nguồn nổ và các sóng đến bộ thu có dạng hình sin độ dài 1 chu kỳ.
3. Hai môi trường có trở kháng sóng khác nhau thì sẽ có hiện tượng khúc xạ và phản xạ. Góc phản xạ bằng góc tới. Góc khúc xạ lớn hơn góc tới khi tốc độ V tới nhỏ hơn V khúc xạ và ngược lại. Ở đây với giả thiết đã nêu ở trên thì ta có góc tới bằng 0 nên góc khúc xạ cũng bằng 0.
4. Sóng đi xuống trực tiếp gọi là Downgoing direct và sóng phản xạ lần đầu gọi là Upgoing primary và các sóng đi xuống thứ cấp gọi là Downgoing multiple và sóng đi lên thứ cấp gọi là Upgoing multiple.
5. Để dễ quan sát thì trên hình vẽ sẽ vẽ các tia tới sẽ có góc nhiêng nhưng không bị lệch hướng.
II. CÁC CẤU HÌNH ĐO:
Cấu hình đo là phương cách bố trí vị trí tương đối của nguồn sóng địa chấn và máy thu trong không gian để lấy được nhiều thông tin hữu ích nhất, với giá thành hợp lý, điều này phụ thuộc vào đối tượng địa chất cần nghiên cứu. Có các cấu hình thông dụng sau trong việc khảo sát VSP. Một số trong chúng là các cấu hình mới của khảo sát VSP do cho phép nối đuợc chuỗi bộ thu dài:
1. Check shot (rig source): dạng khảo sát dùng nguồn để trên giàn, có thể dùng với bước điểm thu lớn. thường dùng để kiểm tra, chính xác hoá tài liệu địa chấn
2. Near offset (rig source): tương tự loại trên, với bước ghi chi tiết hơn
3. Far offset: Khi dùng nguồn phát ở xa. Near offset trong trường hợp giếng nghiêng và far offset đều phản ánh các mặt phản xạ xa hơn khu vực giếng khoan.
4. Walkabove (vetical incident): để nguồn luôn ở viịtrí thẳng đứng so với máy thu. Áp dụng trong các giếng nghiêng
5. Walkaway: Máy dứng yên, nguồn di chuyển theo tuyến cắt ngang qua miệng giếng.
6. Walkaround: nguồn nổ đi xung quanh giàn và bộ thu đứng yên, khảo sát chi tiết bề mặt
7. 3D survey: khảo sát chi tiết các bề mặt phản xạ: nguồn đi xung quanh với các bán kính khác nhau. Cho phép vẽ được hình khối của đối tượng.
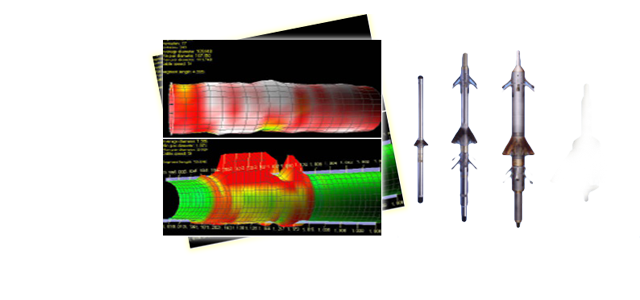
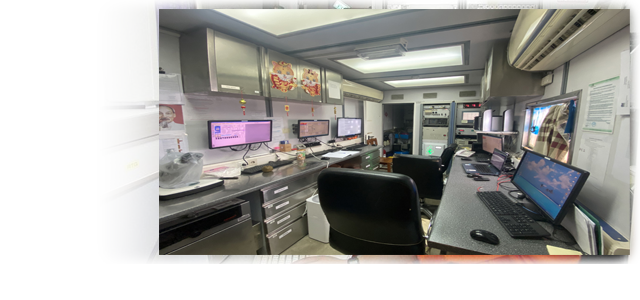
III. CẤU TRÚC HỆ THỐNG:

Nhiệt độ làm việc của các máy giếng: 200 độ C, áp suất 20000 psi. Máy giếng của bộ thiệt bị này làm việc theo nguyên tắc rất khác so với những máy đã có về mặt cấp dòng nuôi, giao thức truyền số liệu lên trên và truyền giữa các máy giếng. Giới thiệu lần lượt từ dưới lên.
1. VRS (Voltage Regulator Section), Sinker bar, motion sensor:
- Là mạch ổn áp DC 110V công suất cao, gồm 10 bộ ổn áp 110V nối tiếp nhau. Điện áp này được dùng để nuôi mô tơ đóng mở càng của các máy trên, nó cũng được nối đến đầu dưới của VRS để kiểm tra điện áp 110V.
- Có thể lắp thêm motion sensor để giám sát sự chuyển động. Điện áp nuôi bộ này được lấy từ mạch ổn áp dưới cùng, tín hiệu motion được đưa đến máy ASR dưới cùng của chuỗi máy và truyền lên theo số liệu này.
- Và 1 quả nặng (sinker bar)
2. ITC (Inter_Tool Cable): Là đoạn cáp 7 ruột nối giữa các máy

- Các đoạn nối này giữa các máy có độ dài bằng nhau, độ dài của chúng phụ thuộc vào mức độ chi tiết của đối tượng khảo sát, với bộ thiết bị Geochain nó có thể dài đến 200M. Thực tế thì tối đa yêu cầu thường là 50M. Hiện nay khoảng cách này thường là 15M đối với hầu hết các dịch vụ đo VSP.
- Đoạn nối giữa máy ASR dưới cùng và VRS thường là ngắn hơn, khoảng 5M để đảm bảo máy xuống được sâu nhất có thể.
- Trên các đoạn ITC này, đầu nối với máy dưới được lắp điểm yếu. các giá trị điểm yếu này sẽ tăng dần từ ITC dưới cùng lên đến trên cùng.
- Có thể nối các đoạn ITC với nhau để tăng khảng cách giữa các máy.
3. ASR (Advanced Seismic Receiver): Là bộ thu tín hiệu địa chấn.

- Sensor: Gồm 3 geophone có trục cảm biến vuông góc với nhau. Cả bộ sensor và các geophone Z và Y được lắp trên các trục xoay, với các bố trí như vậy sẽ đảm bảo hướng của các geophone ổn định theo trọng lực và hướng đổ của giếng khoan.
- Phần cơ khí: gồm mô tơ và càng, ở đây chỉ có 1 càng dùng để ép cứng máy vào thành giếng. Mô tơ dùng điện áp 110 VDC được lấy từ bộ VRS ở dưới cùng. Loại càng này không dùng loxo, lực từ mô tơ được truyền trực tiếp từ mo tơ qua clutch đến càng nên đảm bảo có thể ép cứng máy vào thành giếng. Càng có 3 loại: 7”, 12”, 22”: , chúng ta chỉ mua 2 loại: 12” và 22”
- Phần điện tử: gồm 2 phần chính:
+ ADC để số hoá các tín hiệu từ 3 geophone và các tín hiệu giám sát: nhiệt độ, dòng nuôi mô tơ.
+ Bộ vi xử lý có chức năng nhận lệnh từ telemetry, truyền số liệu của các bộ thu trong máy và của các máy dưới nó lên máy ở trên nó.
+ Giám sát hoạt động của máy, truyền lên TAS dòng nuôi, nhiệt độ của máy. Nếu nhiệt độ cao hơn 150 độ một chút thì sẽ tạm ngưng cấp nguồn vào phần diện tử, đến khi giảm về dưới 150 độ.
- TEC (thermal electric cooler): Toàn bộ phần điện tử được đặt trong ống cách nhiệt làm việc theo nguyên tắc Active coooling.
- Với hệ Geochain có thể lắp tối đa 42 máy ASR.
- Mỗi máy có riêng ID để TAS điều khiển
4. GR Tool: GRT được lắp dưới TAS
5. TAS (Telemetry Adapter Section: là bộ teleemetry thực hiện chức năng giao tiếp giữa tổ hợp máy và thiết bị bề mặt.

- Tách nguồn nuôi DC và các tín hiệu xoay chiều gồm các lệnh từ trên xuống và số liệu từ dưới lên.
- Nhận lệnh điều khiển từ trên xuống để diều khiển các máy ASR
- Nhận số liệu từ các máy ASR ở dưới, mã hoá và điều biến số liệu để truyền lên thiết bị trên mặt.
- Phát ra các tín hiệu kiểm tra trạng thái của thiết bị
- Giám sát quá trình đóng mở của các máy để dòng tổng không bị quá lớn.
- Truyền lên các tín hiệu trạng thái ở dạng messages
- Truyền số liệu GR lên theo đường trạng thái messages của TAS
- Cấp nguồn nuôi và thu nhận tín hiệu sức căng đầu nối
- Nó có thể nối trực tiếp vào máy ASR ở trên cùng nhưng thường được nối thông qua một đoạn ITC để đảm bảo không ảnh hưởng đến sự cảm biến của ASR.
- Làm việc với cáp 7 ruột có chiều dài 2Km đến 10Km
- TEC: tương tự như ASR thì phần điện tử của TAS cũng được đặt trong ống cách nhiệt.
(còn tiếp)
NXQ