

L&TD
LOGGING & TESTING DIVISION
Thiết bị đo độ lệch và phương vị giếng khoan thời gian thực Φ60mm
Trong thực tiển công tác trong lãnh vực địa vật lý giếng khoan, đã có nhiều vấn đề nảy sinh từ thực tế sản xuất: Cần phải có những thiết bị chuyên dụng cụ thể để kịp thời phục vụ công tác đo địa vật lý trên các giàn khoan tìm kiếm thăm dò và khai thác dầu khí. Trong số này có các thiết bị hết sức đặc thù, đến mức hiện nay chúng ta vẫn rất khó tìm được đối tác đáp ứng ở thị trường trong và ngoài nước.
Những khó khăn này đã được lãnh đạo Xí nghiệp Địa Vật Lý - Vietsovpetro sớm nhận thức rõ và đã giải quyết hiệu quả bằng cách tổ chức và duy trì hoạt động thường xuyên của một Nhóm ứng dụng & phát triển công nghệ mới riêng của mình. Nhóm này có nhiệm vụ : Nghiên cứu đồng bộ hóa thiết bị và nghiên cứu chế tạo ra những thiết bị công nghệ mới đáp ứng các yêu cầu phát sinh từ thực tế sản xuất tại giàn khoan.
Trong bài viết này, chúng tôi giới thiệu một thiết bị mới do Nhóm thiết kế chế tạo và đang vừa được đưa vào ứng dụng vào năm 2011. Đó là Hệ thống đo độ lệch và phương vị giếng khoan liên tục, thời gian thực đường kính 60mm.
I. Về phương pháp đo độ lệch và góc phương vị của giếng khoan
Do điều kiện làm việc trên môi trường biển, diện tích giàn khoan biển thường nhỏ nên đối với các giàn khoan tìm kiếm thăm dò và khai thác dầu khí hầu hết các giếng khoan trên biển là các giếng khoan xiên có độ nghiêng lớn. Ngày nay người ta đã phát triển rất nhiều giếng khoan ngang (góc lệch 74º-90º). Có thể hiểu với thiết kế như vậy các giếng khoan này có thể vươn xa hơn trong một vùng diện tích lớn hơn nhằm tăng hệ số thu hồi dầu. Do đó, nhiệm vụ đo góc lệch và góc phương vị của giếng khoan phục vụ trực tiếp cho công tác điều khiển khoan và công tác đo địa vật lý giếng khoan nhằm đảm bảo việc thi công giếng khoan, cũng như đảm bảo các đánh giá khoa học về giếng khoan.
Theo thực tế thi công giếng khoan, công tác đo độ lệch và phương vị giếng khoan gồm :
- Đo trong quá trình khoan [1]
- Đo kiểm tra trong cần khoan [2]
- Đo trong tổ hợp các phương pháp carota tổng hợp [3]
[1] Đo trong quá trình khoan kết hợp với chỉnh xiên được thực hiện khi khoan bằng động cơ đáy, công đoạn đo này sử dụng để trực tiếp điều chỉnh góc xiên và phương vị nhằm đưa choòng khoan đi theo đúng yêu cầu thiết kế của giếng khoan.
[2] Đo kiểm tra trong cần khoan được tiến hành bằng máy đo có đường kính nhỏ (Φ=60mm) trong đoạn cần nhôm của cần khoan để kiểm tra độ lệch và phương vị giếng khoan qua cần tại chiều sâu đã hoàn thành sau một khoảng thời gian khoan phá (khoan khối lượng) và so sánh kiểm tra lại kết quả đo trong quá trình khoan. Kết quả đo còn sử dụng làm dữ liệu gốc để so sánh với kết quả đo Carota tổng hợp và cung cấp dữ liệu cho trạm Mud-Logging để tính ra chiều sâu thẳng đứng, các khúc ngoặt gấp (Dog - Leg), cung cấp dữ liệu cho chương trình Hydraulic (chế độ thuỷ lực khoan) để tính toán ra tình trạng tức thời của giếng khoan cung cấp tham số cho việc thi công, điều khiển khoan và xử lý, điều chỉnh tham số dung dịch. Việc tính toán đưa ra chiều sâu thẳng đứng và phương vị phục vụ công tác liên kết tài liệu Materlog (Trong phương pháp Mud-Logging) để nghiên cứu và so sánh địa tầng.
[3] Đo trong tổ hợp các phương pháp đo carota tổng hợp. Kết quả đo độ lệch và phương vị là dữ liệu cơ sở để tính ra chiều sâu thẳng đứng, định vị giếng phục vụ cho việc nghiên cứu địa tầng và liên kết tài liệu giếng khoan.
Qua những nội dung nêu trên chúng ta nhận thấy phương pháp đo độ lệch và phương vị giếng khoan là phương pháp không thể thiếu trong tổ hợp các phương pháp đo địa vật lý giếng khoan. Hiện nay phương pháp [2] và [3] do xí nghiệp Địa Vật Lý GK đảm nhận, ngày nay từ thực tế sản xuất đã phát sinh những yêu cầu đòi hỏi mới của phương pháp đo:
- · Kết quả đo phải liên tục theo thời gian và độ sâu dưới dạng đường cong (logging), tức là ta phải đo ghi số.
Phải thả đo được từ bên trong của bộ cần khoan, máy giếng phải thả được vào trong cần do đó đường kính ngoài vào cở 60mm vì đường kính trong của bộ cần nặng chỉ vào khoảng 63mm
Phải làm việc trong điều kiện giếng khoan dầu khí, có nghĩa là: máy giếng phải hoạt động được trong điều kiện nhiệt độ lên đến 160ºC và chịu được áp suất đến 1000atm.
II. Các thiết bị đo độ lệch và những bất cập
Để tiến hành đo độ lệch và phương vị trên các giếng khoan theo nhiệm vụ [2] và đôi khi là cả nhiệm vụ [3], Xí nghiệp Địa Vật Lý GK vẫn phải sử dụng các máy đo của Liên Xô cũ, đó là các máy và bảng điều khiển KITTA đã được chế tạo từ thập niên 70, 80. Các máy này có thể thả được vào trong cần khoan (do có đường kính ngoài từ 60 – 70mm) nhưng nhược điểm cơ bản của chúng là chỉ có thể đo theo phương thức đo điểm rời rạc. Tại mỗi điểm đo người đứng trạm phải thông báo cho người điều khiển máy tời dừng việc kéo tời, sau đó sẽ bấm chuyển mạch tùy theo đo độ lệch hay đo phương vị, chỉnh cầu cân bằng, đọc giá trị đo được từ đồng hồ kim rồi ghi các kết quả đo vào giấy bằng bút.
Qua đó chúng ta nhận thấy các kết quả đo như vậy hoàn toàn phụ thuộc vào nhận định chủ quan của người đo. Đây cũng là khó khăn của người sử dụng tài liệu hay phân tích kết quả đo vì không thể so sánh hay kiểm tra được sự đúng, sai và chắc chắn điều đó sẽ khó làm thoả mãn và đáp ứng được yêu cầu của khách hàng. Thêm một yếu tố quan trọng khác nữa đó là, các máy KITTA theo thiết kế của hãng chỉ đo được góc lệch < 50º, muốn đo được góc lớn hơn, kỹ thuật viên phải thay đổi offset (góc nghiêng ban đầu) một cách thủ công và khi đó thì không đo được góc nhỏ hơn offset nữa.
Hơn nữa, hiện tại sau quá trình sử dụng hàng chục năm, vỏ các máy giếng này làm bằng nhôm để tránh nhiễm từ đã bị mài mòn đáng kể, khiến khả năng chịu áp lực của vỏ máy giếng không còn đảm bảo như thiết kế ban đầu. Điều này có nghĩa là các máy giếng này không còn đo được ở độ sâu đến 5000m như thiết kế (tương ứng với áp suất 1000atm ).
Một vấn đề nữa là hiện nay những máy giếng đo độ lệch phương vị hiện đại hơn có thể đo liên tục của các hãng nước ngoài như Halliburton, Tver, Huangding đang có của xí nghiệp lại có đường kính lớn hơn 73mm nên không thể thả vào trong cần khoan để đo được vì đường kính trong của bộ cần nặng chỉ vào khoảng 63mm.
III. Thiết bị đo độ lệch và phương vị thời gian thực Φ60mm
Nhằm đáp ứng đòi hỏi mới của phương pháp đo từ thực tế sản xuất nhóm tác giả đã nghiên cứu và đưa ra giải pháp đồng bộ: "Thiết kế và chế tạo hệ thống đo độ lệch và phương vị thời gian thực ghi số với máy giếng có đường kính ngoài là 60mm. Hệ thống bao gồm: trạm bề mặt, máy giếng và phần mềm đo chuyên dụng".
Hiện tại nhóm đã chế tạo thành công được một hệ thống đo độ lệch và phương vi liên tục gồm một trạm bề mặt và 2 máy giếng. Trong thiết kế này toàn bộ phần điện tử, phần cứng, phần mềm và firmware đều đã được tự xây dựng. Điểm rất khó cho công tác thiết kế đáng lưu ý ở đây là yêu cầu máy giếng phải làm việc ổn định trong điều kiện giếng khoan, tức là điều kiện nhiệt độ lớn (160ºC) và áp suất cao (1000atm).

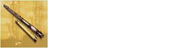
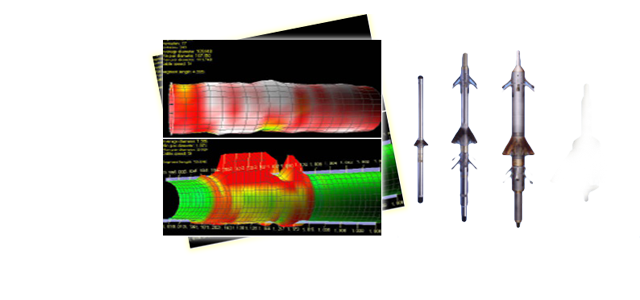
Hình 1. Hệ thống đo độ lệch và phương vi thời gian thực Φ60mm
Máy giếng trước khi đưa vào áp dụng, đã được kiểm tra tính chịu nhiệt bằng cách cho hoạt động trong các buồng nung nhiệt có nhiệt độ cao 160ºC trong 2 giờ. Sau đó, thiết bị đã được đưa vào buồng nung nhiệt độ - áp suất 160ºC/2hrs và 1000 atm. Kết quả thu được khả quan, giá trị đo ổn định nhiệt, đáp ứng yêu cầu làm việc trong điều kiện giếng khoan. Hệ thống hoạt động ổn định, đạt yêu cầu đề ra. Do đó, ta hoàn toàn có thể tiến hành đo trong cần khoan và ghi tài liệu theo thời gian thực, liên tục dưới dạng đường cong carota. Các thông số đo đạt độ chính xác cao, sai số góc lệch: ± 0.10 độ và góc phương vị: ± 0.50 độ. Qui trình vận hành, thao tác đo đơn giản, thiết bị có kích thước gọn nhẹ, hệ thống hoàn toàn đáp ứng yêu cầu của bài toán công nghệ đã đặt ra.
Hệ thống sẽ bao gồm: máy giếng, bảng bề mặt, máy tính và phần mềm chuyên dụng điều khiển hệ thống và thu thập dữ liệu. Hình 2 thể hiện sơ đồ khối của máy giếng, hình 3 cho biết hình ảnh nhìn từ bên ngoài và bên trong của máy giếng trên thực tế.
- Phần máy giếng:

Các thông số kỹ thuật cơ bản:
- Nguồn nuôi máy giếng: 220 VAC, 50/60Hz ;
- Dòng tiêu thụ: 80mA
- Dải đo DEV : 0 – 180o
- Dải đo AZIM: 0 – 360o
- Dải đo RB: 0 – 360o
- Sai số góc lệch: ± 0.10o
- Sai số góc phương vị: ± 0.50o
- Nhiệt độ làm việc: 160 oC/2hrs
- Áp suất làm việc: 1000atm
- Tốc độ truyền dữ liệu 20833 bauds (clock bit = 48μs).
- Vỏ và các chi tiết cơ khí của máy giếng đều được làm từ thép không rỉ và không nhiểm từ (là loại hợp kim Nikel crom, hàm lượng Nikel và Crom cao (Nikel từ 6-15%. Cr từ 16-26%). Mác thép 300, không nhiễm từ, chống ăn mòn tốt, dễ gia công và tính hàn tốt).
Về phần cảm biến, đây là bộ sensor đo gia tốc kế và từ kế tiêu chuẩn chuyên dụng, được đóng gói trong một vỏ cách điện và cách nhiệt (tạm thời). Nguồn nuôi: ±15V, các kênh đo gia tốc kế: Ax, Ay, Az; từ kế Mx, My, Mz và hai kênh phụ Ti, To đo nhiệt độ bên trong và bên ngoài hộp sensor.

Hình 5. Giao thức Hỏi/Đáp giữa Máy giếng và Bảng bề mặt
Nhóm tác giả đã sử dụng dòng vi điều khiển công nghệ CMOS, loại công nghiệp và chịu nhiệt để thực hiện các chức năng điều khiển hệ thống, điều khiển mạch trích/giữ mẫu và tích lũy số liệu ADC, giải mã code manchester-2 để nhận các lệnh điều khiển từ trạm bề mặt, điều chế code manchester-2 32 byte dữ liệu ADC để gửi dữ liệu lên trạm bề mặt qua khối Telemetry.

Hình 6. Sơ đồ khối điều khiển giao tiếp và trao đổi dữ liệu giữa các tầng
B. Phần trạm bề mặt:
Trạm bề mặt là một hệ thống đo xa (Telemetry system) và cũng là một hệ thống nhúng (Embedded system) rất nhỏ gọn (xem trong toàn văn giải pháp). Trạm có chức năng điều khiển mọi thao tác đo, cung cấp nguồn nuôi máy giếng, thu thập số liệu và trao đổi dữ liệu với máy tính qua cổng USB-COMM. Máy tính (dùng máy laptop) sẽ được cài đặt phần mềm chuyên dụng do nhóm tự xây dựng. Với giao diện phần mềm này, máy tính sẽ điều khiển và thực hiện mọi thao tác đo ghi và xử lý số liệu.

Hình 7. Sơ đồ khối trạm bề mặt
Trạm bề mặt gồm có các phần chính (Xem hình 7):
Khối giám sát và phối hợp trực tiếp với máy giếng theo kỹ thuật đo xa của bảng bề mặt.
Khối phụ trợ và bộ nguồn cách ly nuôi máy giếng.Khối MCU surface1 điều khiển giao tiếp với máy giếng qua giao thức manchester-2 để thu thập dữ liệu gốc của máy giếng và giao tiếp song song với MCU surface2 nhằm truyền nhanh dữ liệu đã thu thập được.
Khối MCU surface2 điều khiển giao tiếp song song với MCU surface1 để thu thập dữ liệu từ máy giếng; đếm độ sâu từ Encoder, điều khiển thu thập 8 kênh dữ liệu analog và truyền dữ liệu sau khi giải mã manchester-2 cho máy tính qua cổng USB-COMM.
Máy tính trạm chạy phần mềm Inclinometer, thu thập dữ liệu từ Panel điều khiển qua cổng USB-COMM; xử lý lưu trữ dữ liệu, tính toán các kênh Deviation, Azimuth, Bering, nhiệt độ.
C. Phần mềm:
Máy tính trạm (có thể dùng máy tính xách tay hay máy tính công nghiệp) và Phần mềm Inclinometer giao diện GUI, chạy ở chế độ đa luồng.

Hình 12. Giao diện GUI phần mềm đo Inclinometer
Panel thao tác và hiển thi trên giao diện chính của phần mềm giúp cho user dễ dàng theo dõi độ sâu, tốc độ, nhiệt độ bên trong máy giếng, giá trị góc lệch của máy giếng so với phương thẳng đứng và giá trị góc phương vị. Ngoài ra một số thao tác cơ bản trong công tác đo carota cũng được thể hiện ở mặt tiền của panel này nhằm tạo sự thuận lợi nhất cho người đứng trạm. Chức năng xử lý cơ sở dữ liệu và export dữ liệu cho phép soạn thảo các tham số cần xuất ra trong bảng cơ sở dữ liệu.
IV. Đánh giá:
a. Tính mới:
- Đây là lần đầu tiên một đơn vị trong nước, bằng nội lực của mình đã chế tạo thành công một Hệ thống thiết bị đo carota độ lệch và phương vị giếng khoan hoàn chỉnh bao gồm cả máy giếng, trạm bề mặt và phần mềm theo công nghệ số hiện đại.
- Bằng kỹ thuật “phối ghép trực tiếp trở kháng thấp và phân biệt tín hiệu hỏi/đáp theo cực tính trên cáp địa vật lý 3 lõi” cho phép tối ưu hoá và tối giản hoá khối Telemetry truyền dữ liệu hai chiều qua cáp địa vật lý.
- Giải pháp chuẩn hóa các thành phần từ kế và gia tốc kế trong phương pháp tính các giá trị góc lệch, góc phương vị, góc xoay máy, hệ thống thiết bị này không cần phải chuẩn máy vẫn luôn cho kết quả đo đúng và khắc phục được hiện tượng trôi mạnh ở nhiệt độ cao của các thiết bị khác cùng loại..
b. Khả năng áp dụng:
- Hệ thống thiết bị này có đường kính ngoài của máy giếng bằng 60mm nên có khả năng đo carota độ lệch và phương vị giếng khoan qua cần khoan.
- Vỏ máy giếng được chế tạo bằng loại thép không rỉ, không nhiễm từ và có độ chống mài mòn tốt nên hệ thống thiết bị này cho phép làm việc trong tổ hợp các phương pháp đo carota tổng hợp trong giếng khoan có độ sâu lên đên trên 5000m.
- Với thiết kế mở và tự chủ công nghệ về trạm bề mặt, về máy giếng và cả giao thức trên nền vi điều khiển - máy tính, nên về mặt kỹ thuật hệ thống thiết bị này đã mở ra được khả năng tự thiết kế, chế tạo các hệ thống thiết bị mới, hiện đại tương ứng với các phương pháp đo carota tổng hợp khác.
- Về hiệu quả kinh tế, tuy chưa có "hệ thống thiết bị đo độ lệch và phương vị giếng khoan" hoàn toàn tương đương, nhưng ta cũng đã có số liệu đối chiếu về giá của các máy đo tương tự về công nghệ của các hãng trên giá thành tính đối với một trạm bề mặt và 2 máy giếng. Một vài số liệu tham khảo:
- Máy đo độ lệch và phương vị ghi số Φ73mm của hãng Tver (đơn giá năm 2011): 51.980 USD.
- Trạm bề mặt Karat Mini (đơn giá năm 2011): 139.869 USD.V. Kết luận và đề nghị
Việc đưa Hệ thống thiết bị đo độ lệch và phương vị giếng khoan liên tục vào sử dụng đã giải quyết triệt để bài toán công nghệ, đáp ứng kịp thời yêu cầu sản xuất, khắc phục được các khó khăn tồn đọng trong công tác đo carota độ lệch và phương vị giếng khoan qua cần khoan. Qua những nội dung mà chúng tôi đã đề cập ở trên chúng ta nhận thấy: Để giải quyết những bài toán phức tạp về thiết bị và công nghệ nảy sinh từ thực tế sản xuất - Trí tuệ, bản lĩnh và tiềm năng nhân lực trong nước đã phát huy thật tốt một khi công tác R&D được quan tâm và đầu tư. Thiết nghĩ, nếu được nhìn nhận, tin tưởng và đầu tư đúng mức chúng ta sẽ còn làm được rất nhiều, phục vụ thiết thực cho sự phát triển của đơn vị nói riêng, cũng như đối với sự phát triển khoa học công nghệ của đất nước nói chung.
VI. Tài liệu tham khảo
1. Hệ thống đo độ lệch và phương vị liên tục – TLKT – N.X.Quang, Lê Mạnh Cường, V.A. Đức, Trần Đại Tính – 12/2009
2. Inclinometer Downhole Tool – II – Sodesep 1991
3. Istruction Anadrill Unit. 2008.
NXQ