

L&TD
LOGGING & TESTING DIVISION
Thiết kế chế tạo thiết bị kiểm soát áp suất bắn của súng tạo sóng địa chấn khi thực hiện đo địa chấn dọc thành giếng VSP
Nhóm tác giả - Nguyễn Xuân Quang - Hàn Đại Hào - Dương Thái Sơn - Vũ Anh Đức - Lê Mạnh Cường
Mô tả giải pháp {jcomments off}
1. Tình trạng công việc về vấn đề đang được xem xét trước khi đưa ra giải pháp (Mô tả những nhược điểm của đối tượng hiện hành kèm theo bảng, sơ đồ, hình vẽ, …trong trường hợp cần thiết).
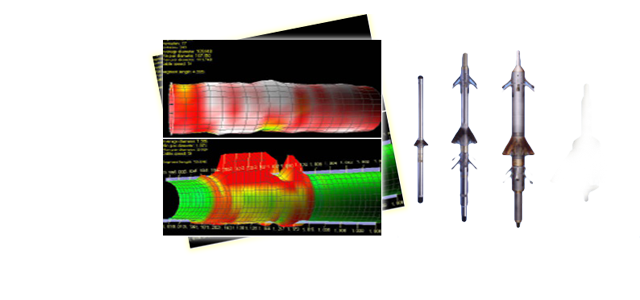
Đối với phương pháp đo địa chấn thành giếng khoan (VSP), việc giữ cho áp suất bắn của súng hơi tạo sóng địa chấn giữa các lần bắn đều nhau và ổn định là rất quan trọng, có ảnh hưởng lớn đến chất lượng tài liệu đo. Bộ thiết bị đo địa chấn giếng khoan của xí nghiệp không có thiết bị theo dõi áp suất của súng từ trạm đo nên khi bắn liên tục phải sử dụng bộ đàm để kỹ sư đứng trạm liên lạc với người trực máy nén khi muốn biết áp suất hơi. Điều này rất bất tiện, nó làm tăng thời gian đo và bộ đàm còn gây nhiễu cho các thiết bị điện tử của trạm VSP.
2. Nội dung của giải pháp đưa ra (Mục đích, bản chất, tính ưu việt kèm theo những tài liệu phù hợp dạng bảng, sơ đồ, hình vẽ, …trong trường hợp cần thiết).
- Sau khi nghiên cứu cấu tạo của bộ Máy nén – Súng hơi, nhóm tác giả có nhận định:
Cần phải có hệ thống theo dõi, kiểm soát áp suất khí nén từ xa (giữa trạm điều khiển và sàn khoan) để kiểm soát cho áp suất bắn nổ ổn định cho tất cả các lần bắn, điều chỉnh kịp thời máy nén để đáp ứng yêu cầu của công việc, mặt khác cần có thêm thiết bị liên lạc Intercom chuyên dụng hai chiều giữa trạm đo và người thao tác ngoài hiện trường chạy máy nén khí.
- Với những nhận định trên nhóm tác giả thực hiện giải pháp cải tiến như sau:
Thiết kế thiết bị đo áp suất ghi số dựa trên kỹ thuật vi điều khiển, đồng thời tích hợp thêm bộ Intercom chuyên dụng cho phép liên lạc 2 chiều (khoảng cách 100m) giữa kỹ sư đứng trạm và người vận hành máy nén khí.
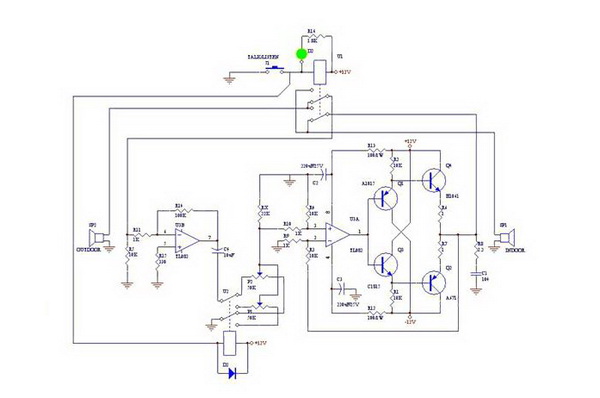
2.1 PHẦN TALKBACK INTERCOM:
Đây là bộ Intercom hoạt động 2 chiều Talk/Listen đầy đủ, trong đó hệ thống 2 loa 8Ohms ở 2 Terminal cũng là các microphone có độ nhạy cao (60 dB).
2.2 PHẦN ĐO ÁP SUẤT :
2.2.1 Sơ đồ khối :
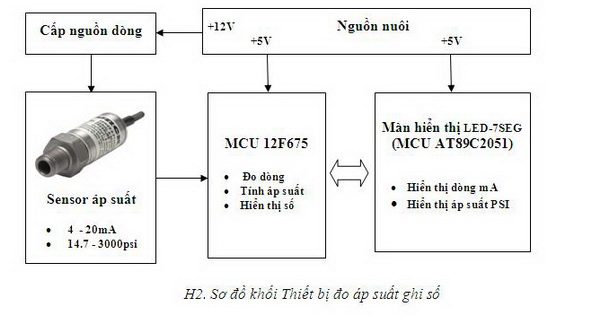
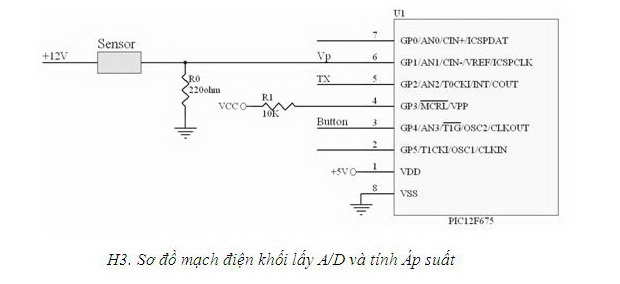
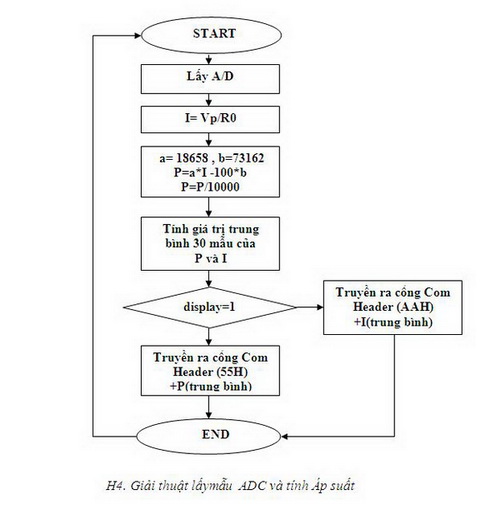
2.2.2 Khối lấy A/D và tính áp suất :
Sensor áp suất được mắc nối tiếp với điện trở chính xác R0, do cơ chế đo áp suất của Sensor được thiết kế tỉ lệ tuyến tính với dòng điện nên việc đo áp suất đạt lên Sensor sẽ được qui về việc đo dòng điện đi qua tải R0. Dòng điện Ip chạy qua Sensor: Ip = Vp/R0, trong đó áp suất tỉ lệ tuyến tính với dòng điện. Phép chuẩn tín hiệu (calibration) theo giá trị đo được cung cấp bởi hãng (4mA ÷ 20mA tương ứng với 14.7PSI ÷ 3000PSI) sẽ được thực hiện trên MCU PIC12F675 để có được giá trị áp suất.
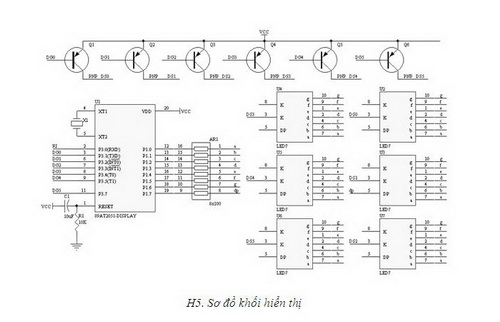
2.2 PHẦN HIỂN THỊ SỐ:
Nguyên lý hoạt động:
- Phần điều khiển : Sử dụng vi điều khiển AT89251, thiết kế giao tiếp cổng COM để nhận dữ liệu từ khối lấy đo và tính áp suất của PIC12F675, kỹ thuật quét LED áp dụng nguyên lý lưu ảnh.
- Phần khiển dòng cho LED : Sử dụng các Transistor loại NPN A1015 nhận tín hiệu từ khối điều khiển, Transistor hoạt động như những khóa điện tử cung cấp nguồn nuôi LED theo nhịp điều khiển quét .
- Phần hiển thị : Bao gồm 6 bộ LED-7 đoạn Anode chung, việc giải mã được thực hiện bởi khối điều khiển AT89C2051, LED chỉ sáng khi các cathode ở mức thấp.
- Sau khi cải tiến bộ thiết bị có những ưu điểm sau:
Cho phép kỹ sư đứng trạm kiểm soát được áp suất cho mỗi lần bắn, đảm bảo áp suất giữa các lần bắn luôn ổn định, chênh lệch không quá ± 4Psi, do đó giữ cho sóng thu của Hydrophone tương đương nhau giúp cho kiểm soát sóng buble được tốt hơn , làm tăng chất lượng của sóng thu được.
Dưới đây là một số hình ảnh về ứng dụng của hệ thống tại thực địa của thiết bị theo dõi, kiểm soát áp suất bắn của súng tạo sóng địa chấn dùng trong phương pháp VSP
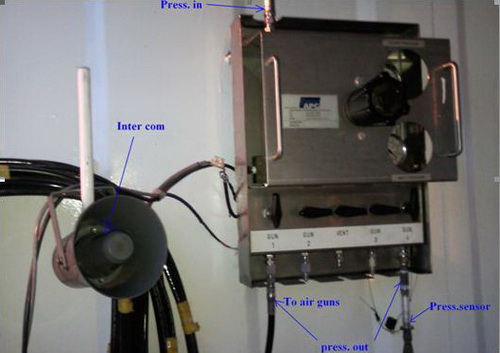
H6. Bộ loa và sensor áp suất

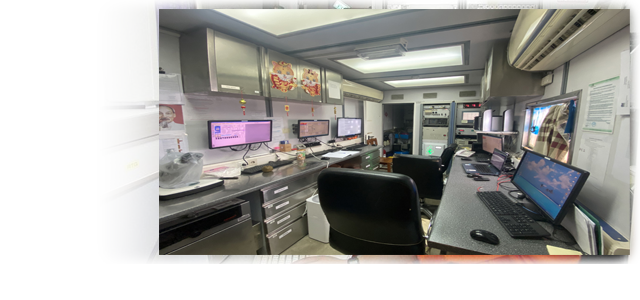
H7. Bảng đo tích hợp Intercom và bên trong trạm đo VSP

H8. Bảng đo trong chế độ hiển thị dòng điện A=4.01mA

H9. Bảng đo trong chế độ hiển thị áp suất P=16PSI
Phòng CNTT